Point cloud projection
This page is available for practice as an interactive jupyter notebook. A significant disadvantage of point clouds is the unclear neighborhood relation between points. One way of recovering the neighborhood information is to project a 3D scene to a 2D raster.
2d to 3d
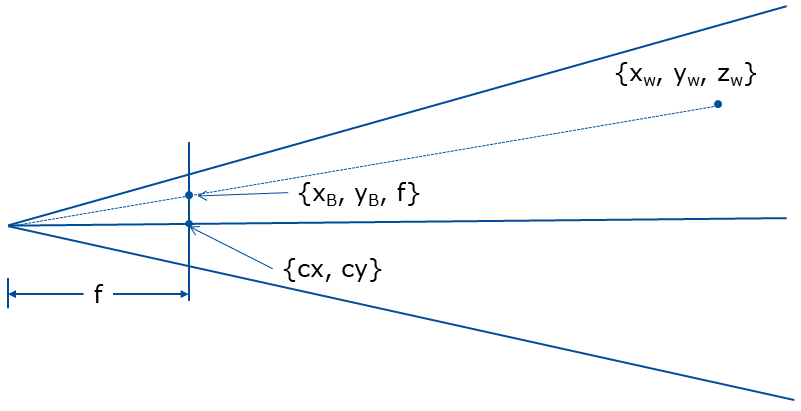
We are given $cx$, $cy$ the coordinates of the image center and $f$ the focal length. Based on geometry of the sensor sketched below we can compute the $x_w,y_w,z_w \in \mathbb{R}$ real world coordinates from $x_b,y_b \in \mathbb{N}$ from the discrete depth image coordinates and $d \in \mathbb{R}$ distance measured for a certain pixel $x_b,y_b$.
$\LARGE y_w=d$, $\LARGE x_w=\frac{(x_b-cx)y_w}{f}$ and $\LARGE z_w=\frac{(y_b-cy)y_w}{f}$
We already solved the problem in other direction 2D to 3D earlier. Let’s use this equation to develop solution for problem in the opposite direction 3D to 2D.
Tasks
- Determine the equation for the projection
- Implement the projection ‘world_to_depth’.
- Load ‘depthImage.png’ and transform it into the 3D cloud then transform it back to 2D raster.
- Generate a raster which shows the scene from a slightly different angle, like 20° different.
YOUR ANSWER HERE
import numpy as np
from imageio import imread
from math import cos, sin, pi
def depth_to_world(f, cx, cy, img):
""" Converts depth raster to 3D coordinates
f: Focal distance
(cx, cy): center point
image: 2D Raster with depth values stored at each cell
return: numpy array of 3d points
"""
points = []
for index, d in np.ndenumerate(img):
y_w = d
x_w = ((float(index[0]) - cx)*y_w)/f
z_w = -((float(index[1]) - cy)*y_w)/f
points.append(np.array([x_w, y_w, z_w]))
points = np.asarray(points)
return points
def world_to_depth(f, cx, cy, points):
""" Converts depth raster to 3D coordinates
f: Focal distance
(cx, cy): center point
points: 2D Raster with depth values stored at each cell numpy array of 3d points
return: 2D Raster(numpy) with depth values stored at each cell
"""
# YOUR CODE HERE
raise NotImplementedError()
return image
img = imread('depthImage.png')
# YOUR CODE HERE
raise NotImplementedError()
from pylab import cm,imshow
imshow(re_image,cmap=cm.Greys)
| Author: | Artem Leichter |
| Last modified: | 2019-04-30 |