RANSAC optimization
This page is available for practice as an interactive jupyter notebook. In this task, we will optimise the implementation of RANSAC from the previous assignment. The runtime of the RANSAC algorithm depends on the required number of draws, and the time, the algorithm needs to process them. In this task, you shall improve the RANSAC algorithm of the last exercise under the aspect of complexity. Instead of drawing random points draw points from the neighborhood:
- Choose one point $p_1$ randomly
- Draw point $p_2$ and $p_3$ in the neighborhood of $p_1$
- Consider threshold!
- Min radius to avoid effects by noise
- Max radius in order not to draw $p_2$ and $p_3$ from another plane.
- Use Kd-tree for range search
# imports
from plyfile import PlyData
import numpy as np
from imageio import imread
import math
# YOUR CODE HERE
raise NotImplementedError()
# implement improved RANSAC
# implement RANSAC
def ransac_opt(points, z, w, max_dif, min_raius, max_radius):
'''Finds the normal vectors of the planes in a scene
:params:
z: likelihood, that plane can be found
w: outliers in percent
t: treshold for accepted observations
min_radius: min distance of p_2 and p_3 from p_1
max_radius: max distance of p_2 and p_3 from p_1
:return:
n: - normalized normal vector
d: - distance from origin
new_points: - list - Consensual points
outliers: - list - Outlier points
'''
# YOUR CODE HERE
raise NotImplementedError()
return n_max, d_max, max_points, outliers
# load data
_data = PlyData.read('schneiderberg15cm_1.ply').elements[0].data
schneider1 = np.stack((_data['x'], _data['y'], _data['z']), axis=1)
_data = PlyData.read('schneiderberg15cm_2.ply').elements[0].data
schneider2 = np.stack((_data['x'], _data['y'], _data['z']), axis=1)
Compare
Use suitable values for the minimum and maximum point distance. Detect in both scenes the same planes as in the last exercise and compare the results. How does the runtime improve? Which parameters did you use and how many iterations were required?
# YOUR CODE HERE
raise NotImplementedError()
Generation of a point cloud from a distance image
In the following task we will generate 3D point cloud from a distance image. Given is the distance image in file ‘depthImage.PNG’. It has been generated with a Microsoft Kinect v2, which originally has been developed for Microsoft Xbox. Kinect combines depth sensor, camera and a 3D microphone. The infrared projector beams a (known) structured pattern which is measured by the infrared camera.
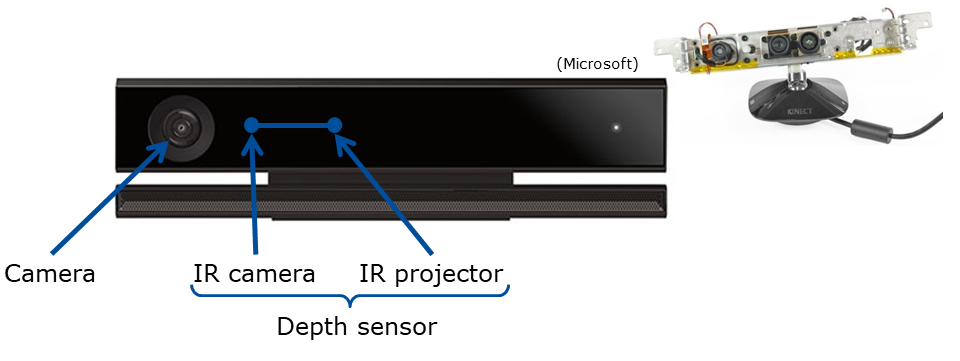
Microsoft Kinect v2
Our Kinect has following parameters:
- Resolution of the depth camera: 512 x 424 px
- Measurement distance: 0.5-4.5 m
- Opening angle depth camera
- 70° horizontal
- 60° vertical
- Focal distance f: 365.5953 px
- Center point
- cx: 260.1922
- cy: 209.5835

Calculation
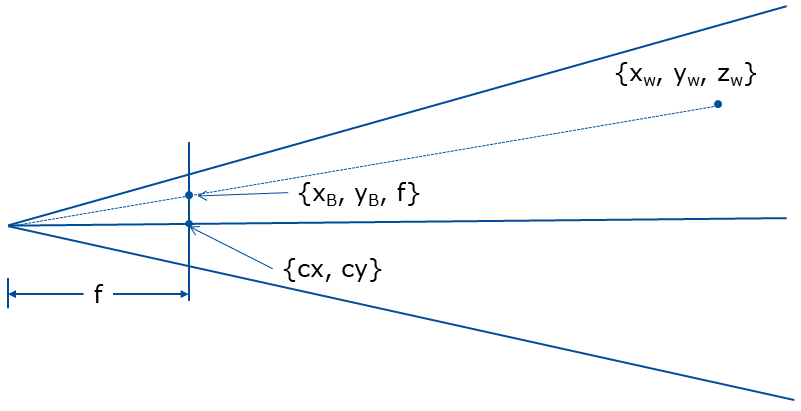
We are given $cx$, $cy$ the coordinates of the image center and $f$ the focal length. Based on geometry of the sensor sketched below we can compute the $x_w,y_w,z_w \in \mathbb{R}$ real world coordinates from $x_b,y_b \in \mathbb{N}$ from the discrete depth image coordinates and $d \in \mathbb{R}$ distance measured for a certain pixel $x_b,y_b$.
$\LARGE y_w=d$, $\LARGE x_w=\frac{(x_b-cx)y_w}{f}$ and $\LARGE z_w=\frac{(x_b-cy)y_w}{f}$
def depth_to_world(f, cx, cy, image):
""" Converts depth raster to 3D coordinates
f: Focal distance
(cx, cy): center point
image: 2D Raster with depth values stored at each cell
return: numpy array of 3d points
"""
# YOUR CODE HERE
raise NotImplementedError()
return points
# load image
img = imread('depthImage.PNG')
Expected outcome of the conversion looks like this:
| Author: | Artem Leichter |
| Last modified: | 2019-04-30 |